Task 4.2: Rock model for peak ground motion and spectral values (LGIT-UJF, METU, BRGM)
The Ground-motion prediction equation logic-tree: Selection, testing and weighting approach
The methodology adopted to prepare the logic tree for the pan-European PSHA is outlined in detail in Delavaud et al. (2012). The participating scientist were challenged with two major tasks: 1) To propose a process to prepare a GMPE logic tree for a regional scale PSHA project and suggest guidelines serving future such projects and 2) to identify, within this strategy, the smallest set of GMPEs to capture the epistemic uncertainty in ground-motion prediction in Europe.
The novelty of the selected strategy is to consider expert judgment on the one hand and, on the other hand, use an objective data driven approach to select and rank GMPEs to guide the choice and weight of the models. Data driven guidance is indeed feasible and can give valuable information about the ability of GMPEs to predict ground motion in different regions (e.g., Drouet et al., 2007; Allen and Wald, 2009; Delavaud et al., 2012).
The adopted approach consists of the following steps:
- Selection of GMPEs for the tectonic regimes to be considered
- Expert elicitation guided by a set of predefined rules that the experts need to obey to
- Objective testing candidate models against regional data based on Scherbaum et al. (2009)
- Combining the results of the indeendent steps 2 and 3 for a proposed weighting scheme
- Sensitivity testing of the proposed weighting scheme of the logic-tree per tectonic regime and revision (if necessary) of the proposed weights.
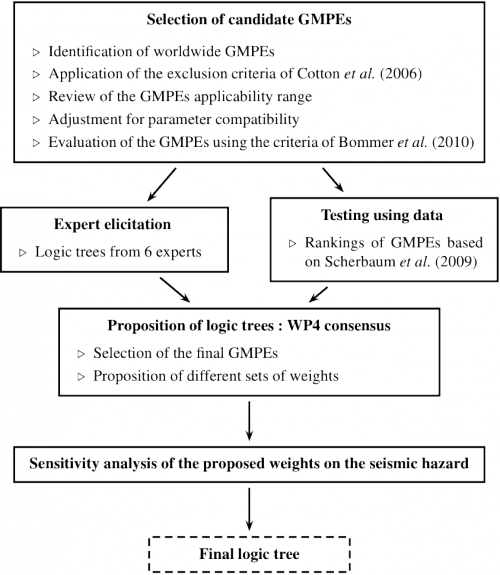
Figure 1: Procedure to define SHARE GMPE logic-tree (Delavaud et al., 2012).
The task to prepare the GMPE logic-tree involved roughly a dozen institutions with the goal, in a limited amount of time (18 months), to commonly identify the smallest set of ground motion prediction equations (GMPEs) and associated weights to capture the epistemic uncertainty in ground-motion prediction in six different tectonic regimes in the Euro-Mediterranean region. The limited amount of time and the large geographical area covered by SHARE made this task quite challenging.
Outline of logic-tree selection
We now describe the method adopted to build the logic tree for PSHA in Europe. The particularity of our approach is that we do not only account for the judgment of experts to select and rank models, as it is commonly done, but we also use data to guide our choices. Thanks to an increasing amount of strong-motion data, data driven guidance is indeed now feasible and can give valuable information about the ability of GMPEs to predict ground motion in different.
The first step consisted in pre-selecting candidate GMPEs for the prediction of ground motion in each existing seismotectonic regime in the wider European region. This pre-selection was realized from an already compiled list by Douglas (2008) that contains over 250 published ground-motion models, to retain a subset of the most robust equations. The six broad tectonic domains that have been identified by SHARE Work Package 3 to represent the region covered by the SHARE project. For this pre-selection, it was decided to apply the exclusion criteria proposed by Cotton et al. (2006), updated by Bommer et al. (2010). From the existing GMPEs, six models remained for stable continental regions (SCR), eight for subduction zones (SZ), nineteen for active shallow crustal regions (ASCR) including six regional or local models, one model for volcanic zones and one for areas of deep focus non-subduction earthquakes. No model for the prediction of ground motion from oceanic crustal earthquakes was available in the international literature, but models for ASCR and SCR have been suggested to account for such seismotectonic regimes.
As a second step, a group of six experts was asked to propose logic trees expressing their degree of belief in the ability of the candidate GMPEs to predict earthquake ground motions in each tectonic regime. These experts were: J. Bommer (Imperial College, London, UK), F. Bonilla (IFSSTAR, Paris, France), H. Bungum (NORSAR/ICG, Kjeller, Norway), J. Douglas (BRGM, Orléans, France), E. Faccioli (Politecnico di Milano, Milano, Italy) and N. Theodoulidis (ITSAK, Thessaloniki, Greece). The experts selected GMPEs that are sufficiently robust to cover a wide range of magnitudes, distances and spectral periods. Therefore, global predictive models were preferred as compared to regional ones. Experts concluded that the number of selected GMPEs should be kept as small as possible (between two and five) to prevent the logic tree for ground-motion prediction being too complex. They selected the smallest a set of models that enabled them to capture epistemic uncertainty as much as possible.
To complement the expert opinions, testing of the candidate GMPEs against empirical data was undertaken. The goal of this phase was to judge the applicability of candidate models by evaluating their probability to have generated the available observations. We used the data-driven method developed by Scherbaum et al. (2009) that implemented an information-theoretic approach for the selection and the ranking of GMPEs. This method uses a criterion, the average negative sample log-likelihood (called LLH) that is a measure of the distance between a model and the unknown process that generated the observations (nature). GMPEs for SZ were tested against Greek data while GMPEs for ASCR were tested against data from Europe and the Middle East as well as worldwide data in order to cover a large range of magnitudes. This approach provides a ranking of the candidate GMPEs. An application of the criterion at global scale can be found in Delavaud et al. (2012). We should keep in mind that this ranking is based on the available dataset that is unfortunately limited (this ranking could change with additional data). Therefore a great effort should be dedicated to the collection of data and meta-data in order to get as much information as possible from the GMPE testing.
Based on the results of both the expert judgment and the testing, a consensus set of GMPEs was determined. Models supported by the data testing and the expert choices were automatically included in the logic tree. A discussion was conducted for models supported by a majority of experts or supported by the data testing. The final logic trees are presented in Figure 2.
Figure 2: Proposed GMPE logic-tree for SHARE after Delavau et al. (2012).
Each project is unique and it is important to be aware of its particularities. However, we think that the procedure described above is reproducible and that at least it contributed to the reflections on the way a logic tree for ground-motion prediction should be built. Although logic trees are now widely used, we realized that it is not clear yet how weights should be assigned and what they should be assumed to represent (see Scherbaum and Kühn (2011) for a discussion on this subject).